EiTS — ESP32 Pocket Video Player
MJPEG and MP3 on an SD card, one button, battery aware firmware

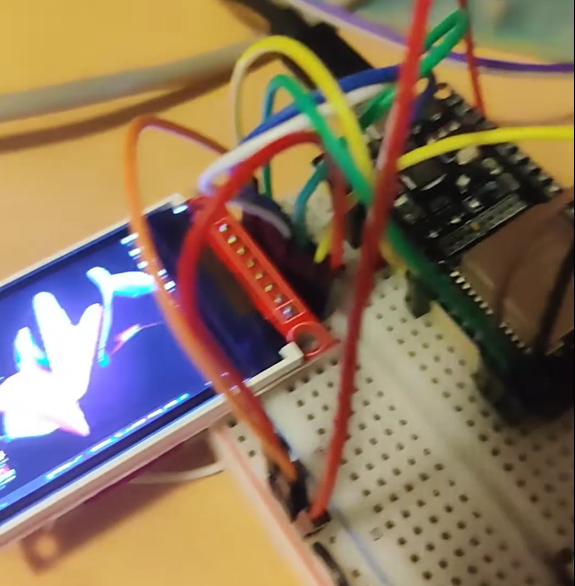
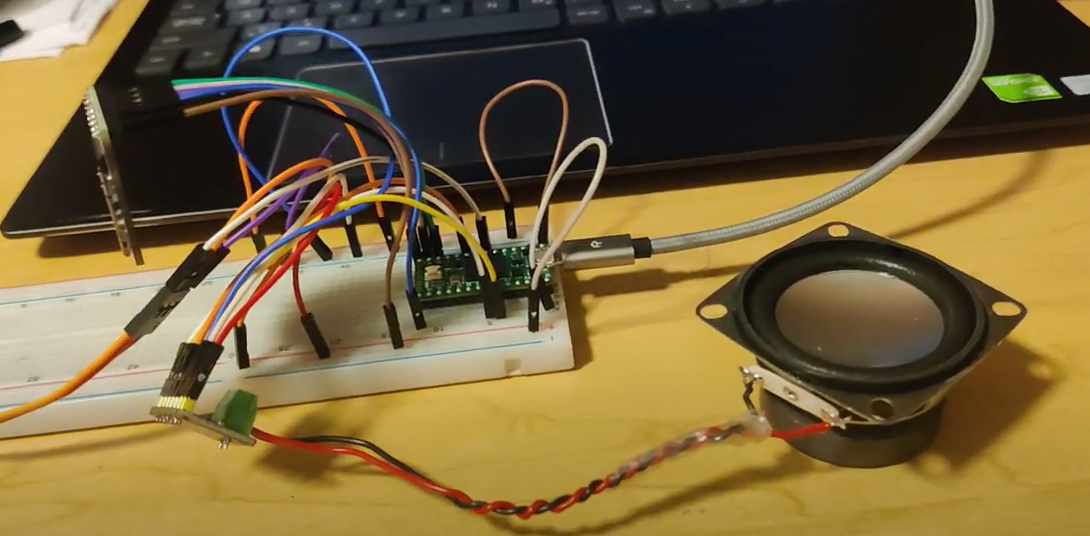
EiTS (Esp infoTainment System) is a project I built around an ESP32-S3: a tiny ST7735 LCD, I2S audio, and files on a microSD card become a portable player for MJPEG “video” and MP3 audio. The idea started from the Mini Retro TV Instructables project, then grew into its own hardware (power path, battery UI, 3D printed case) and firmware with FreeRTOS tasks, gesture detection on a single button, loop and auto next modes, deep sleep...
[Read More]